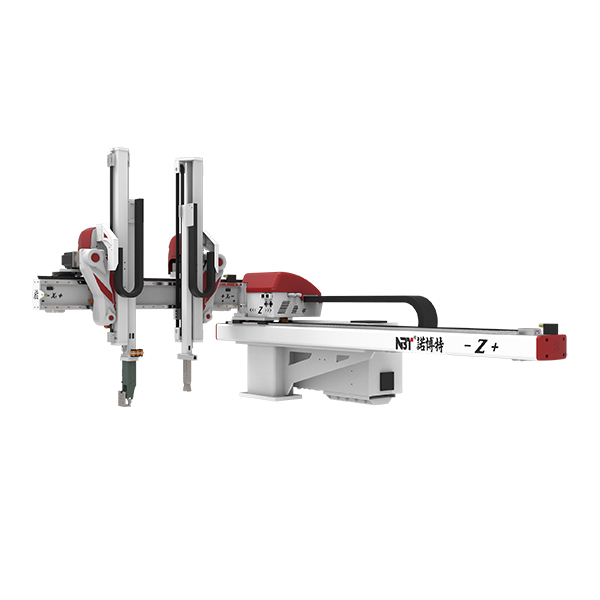
หุ่นยนต์สำหรับพลาสติก
.jpg)
| แบบอย่าง | พิมพ์ | ช่วง IMM | จังหวะ | มุมแกว่ง | มุมการหมุนของตัวจับยึด | รับน้ำหนักสูงสุด (รวมตัวจับยึด) | เวลาขั้นต่ำในการนำกลับบ้าน | ระบบขับเคลื่อน | แรงดันลมใช้งาน | การบริโภค | อำนาจที่ยิ่งใหญ่ที่สุด | น้ำหนักสุทธิที่มากที่สุด | ||
| แนวตั้ง | ขวาง | ขวาง | ||||||||||||
| ตัน | mm | mm | mm | kg | วินาที | กก.ฟ./ซม. | NL/รอบ | kg | ||||||
| SPRSS6001 | เดี่ยว เวที | 90-200 | 610 | 150 | 220 | 90 | 90 | 3 | 1.5 | ระบบนิวแมติก | 5-7 | 6.8 | AC220V± 10%B 12A 50/60Hz (ตัวเดียว) ระยะ) | 68 |
| SPRSS7001 | 90-250 | 730 | 150 | 280 | 1.5 | 7.2 | 68 | |||||||
| SPRS1S6001 | 90-200 | 670 | 150 | 220 | 1.5 | 5.2 | 68 | |||||||
| แบบอย่าง | A | B | C | D | E | F | G | H | 1 | J | K |
| SPRSS6001 | 270 | 50 | 175 | 610 | 552 | 820 | 160 | 655 | 1290 | 360 | 190 |
| SPRSS7001 | 330 | 50 | 175 | 730 | 552 | 820 | 160 | 680 | 1410 | 360 | 190 |
| SPRS1S6001 | 280 | 60 | 175 | 670 | 550 | 860 | 160 | 685 | 1320 | 425 | 190 |


.jpg)


เขียนข้อความของคุณที่นี่แล้วส่งมาให้เรา





