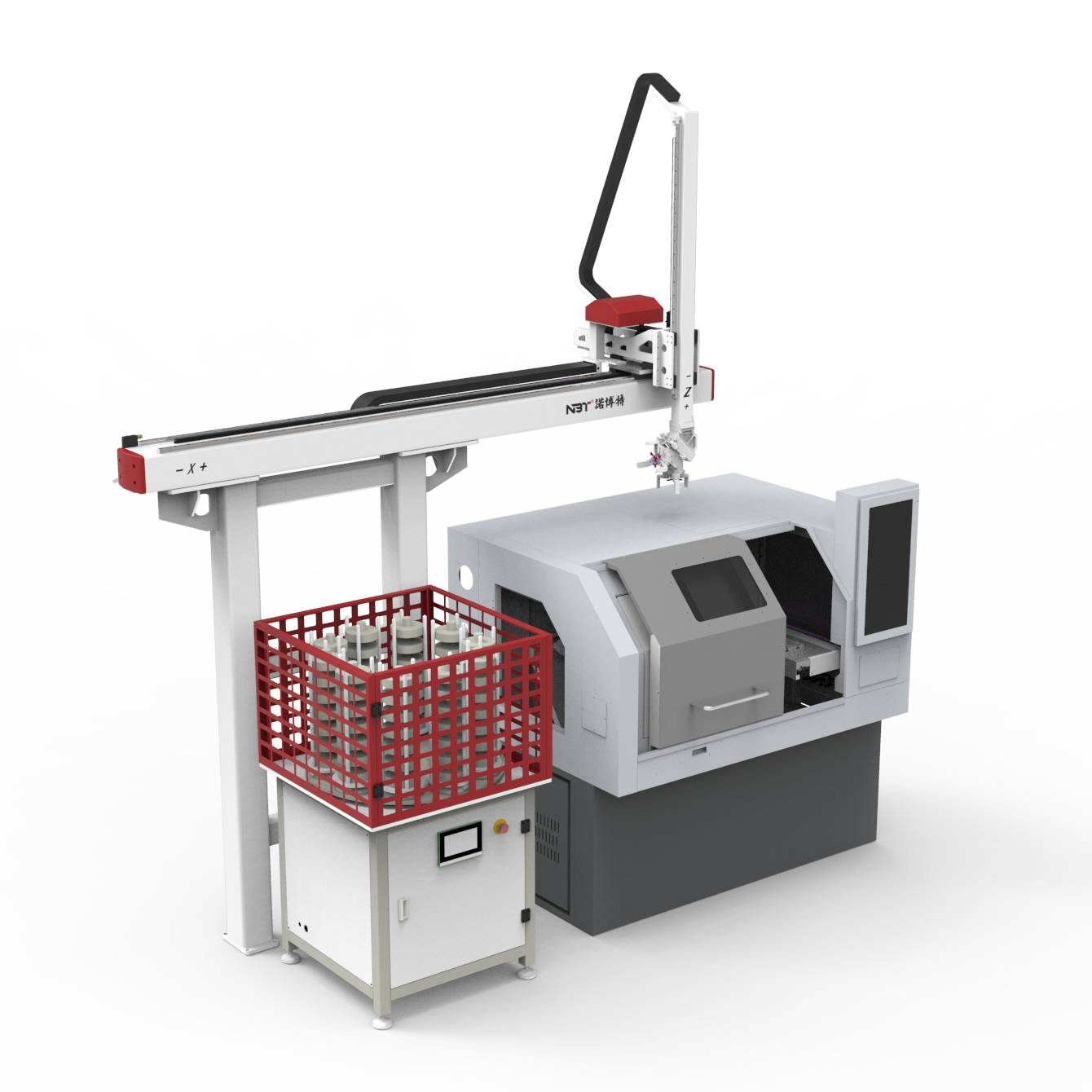
หุ่นยนต์สำหรับเครื่อง CNC

| โครงการ | SPRE3S-J-05 | SPRE3S-J-05 | SPRE3S-J-20 |
| แรงกดของแขนกล (กก.) | 2.5x2 | 5x2 | 10x2 |
| การเคลื่อนที่ในแนวนอน (แกน X) | 1900/2300 (ปรับแต่งได้) | ||
| จังหวะดึง (แกน Y) | 350 | ||
| การเคลื่อนที่ของแขน (แกน Z) | 1000 | ||
| ความแม่นยำในการกำหนดตำแหน่งซ้ำ (มม.) | ±0.05 | ||
| ความเร็วในการเคลื่อนที่ของแกน X (เมตร/นาที) | 120 | ||
| ความเร็วในการเคลื่อนที่ของแกน Y (เมตร/นาที) | 90 | ||
| ระยะการเคลื่อนที่ของแขนแกน Z (เมตร/นาที) | 90 | ||
| น้ำหนักวัสดุสูงสุด (กก.) | 2 | 4 | 8 |
| ประเภทไดรฟ์ | เซอร์โว+ ตัวลดเกียร์ | ||
| วิธีการส่งผ่าน | แร็คเกียร์สามแกน | ||

เขียนข้อความของคุณที่นี่แล้วส่งมาให้เรา





