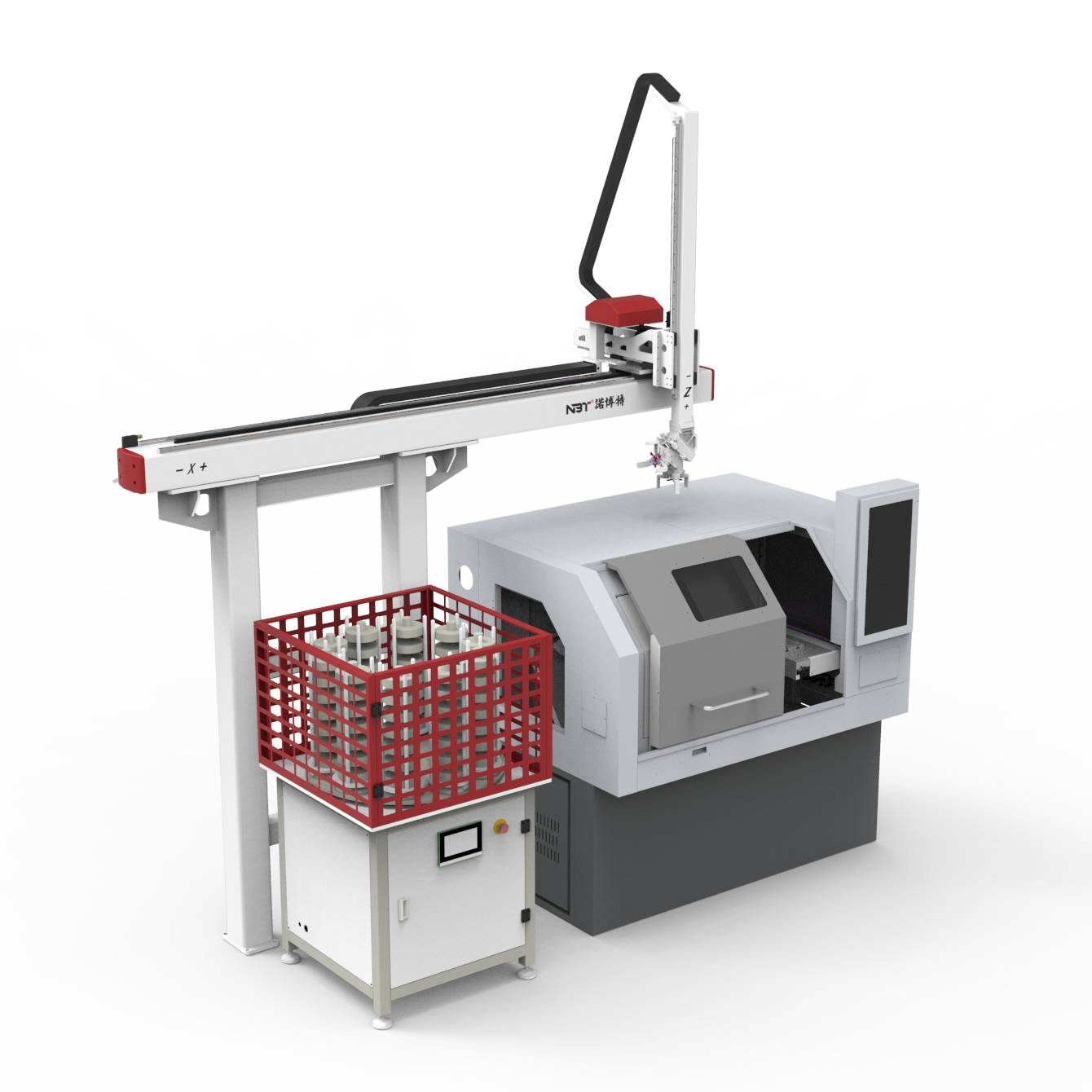
सीएनसी सेंटर के लिए रोबोट

| परियोजना | SPRE3S-J-05 | SPRE3S-J-05 | SPRE3S-J-20 |
| यांत्रिक भुजा का भार (किलोग्राम) | 2.5x2 | 5x2 | 10x2 |
| क्षैतिज गति (एक्स-अक्ष) | 1900/2300 (अनुकूलन योग्य) | ||
| पुल स्ट्रोक (वाई-अक्ष) | 350 | ||
| भुजा का स्ट्रोक (Z-अक्ष) | 1000 | ||
| पुनरावर्ती स्थिति निर्धारण सटीकता (मिमी) | ±0.05 | ||
| एक्स-अक्ष की गति (मीटर/मिनट) | 120 | ||
| वाई-अक्ष की गति (मीटर/मिनट) | 90 | ||
| Z-अक्ष पर भुजा का स्ट्रोक (मीटर/मिनट) | 90 | ||
| सामग्री का अधिकतम भार (किलोग्राम) | 2 | 4 | 8 |
| ड्राइव प्रकार | सर्वो+ रिड्यूसर | ||
| संचरण विधि | तीन अक्षीय गियर रैक | ||

अपना संदेश यहाँ लिखें और हमें भेजें।





