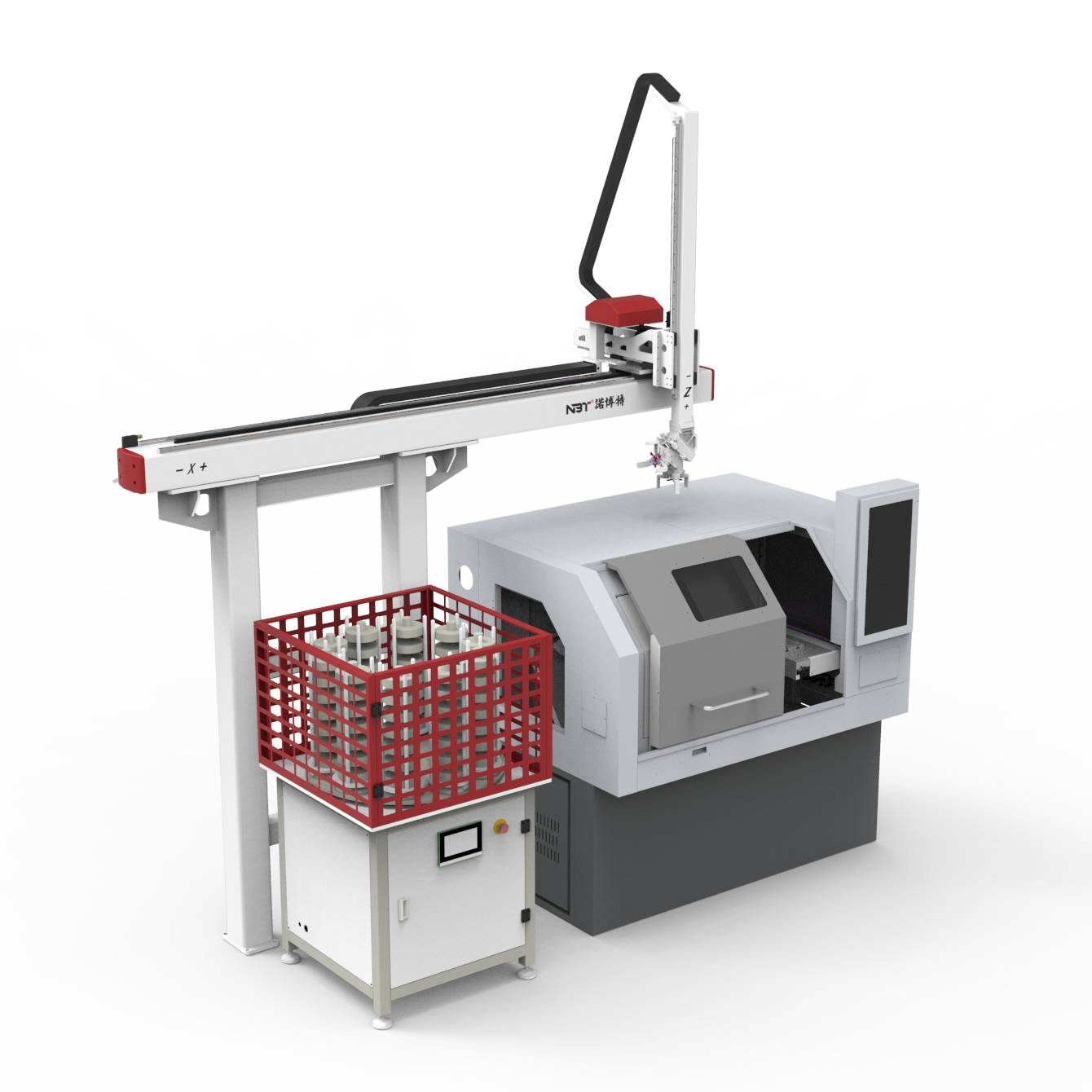
რობოტი CNC ცენტრისთვის

| პროექტი | SPRE3S-J-05 | SPRE3S-J-05 | SPRE3S-J-20 |
| მექანიკური მკლავის დატვირთვა (კგ) | 2.5x2 | 5x2 | 10x2 |
| ჰორიზონტალური მოძრაობა (X-ღერძი) | 1900/2300 (მორგება შესაძლებელია) | ||
| წევის სტრიქონი (Y-ღერძი) | 350 | ||
| ხელის დარტყმა (Z-ღერძი) | 1000 | ||
| განმეორებითი პოზიციონირების სიზუსტე (მმ) | ±0.05 | ||
| X ღერძის მოძრაობის სიჩქარე (მ/წთ) | 120 | ||
| Y ღერძის გადაადგილების სიჩქარე (მ/წთ) | 90 | ||
| Z-ღერძის მკლავის დარტყმა (მ/წთ) | 90 | ||
| მასალის მაქსიმალური წონა (კგ) | 2 | 4 | 8 |
| დისკის ტიპი | სერვო+ რედუქტორი | ||
| გადაცემის მეთოდი | სამღერძიანი გადაცემათა კოლოფი | ||

დაწერეთ თქვენი შეტყობინება აქ და გამოგვიგზავნეთ





