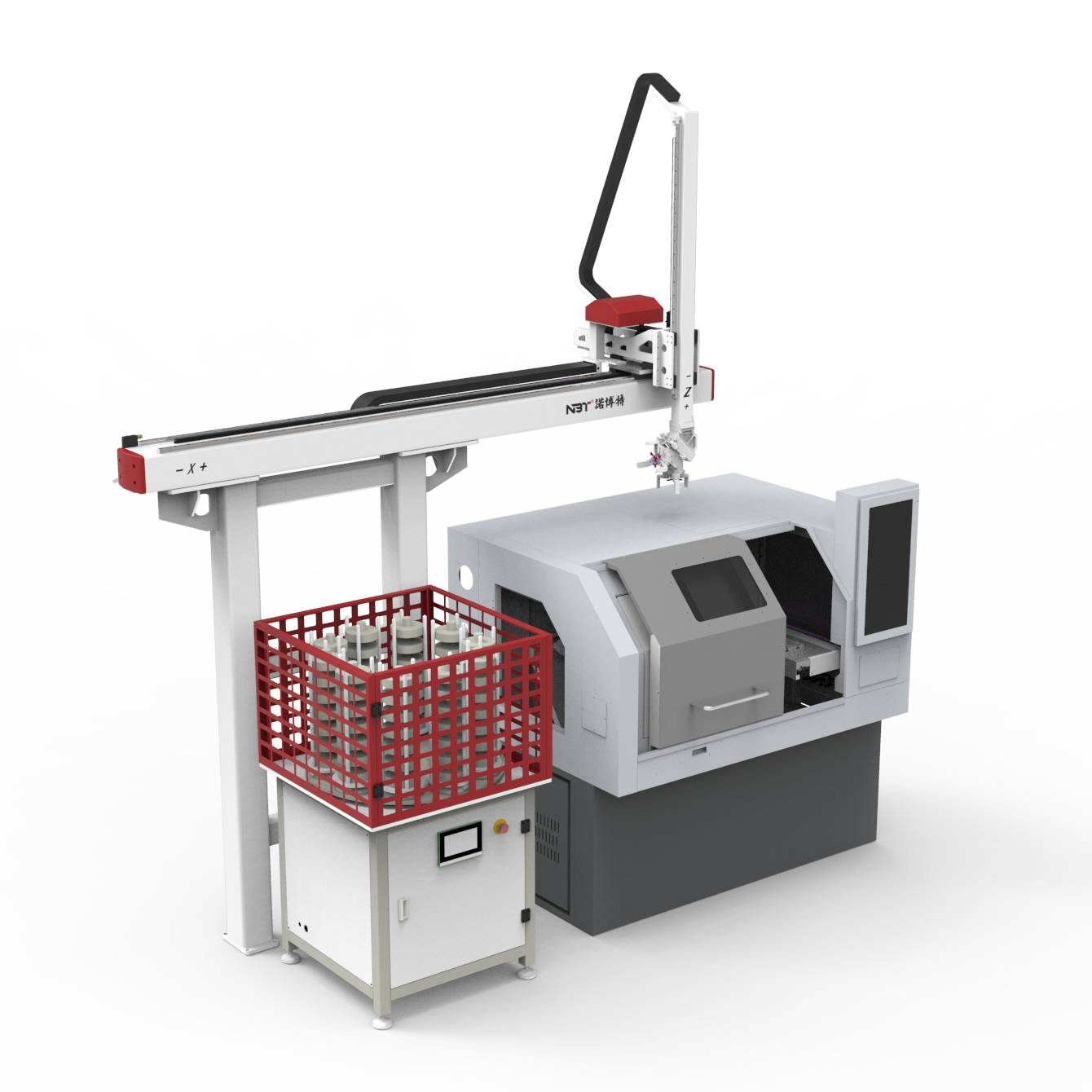
Робат для цэнтра з ЧПУ

| праект | SPRE3S-J-05 | SPRE3S-J-05 | SPRE3S-J-20 |
| Механічная нагрузка на кранштэйн (кг) | 2,5x2 | 5x2 | 10x2 |
| Гарызантальны рух (вось X) | 1900/2300 (наладжвальны) | ||
| Ход цягі (вось Y) | 350 | ||
| Ход рычага (вось Z) | 1000 | ||
| Паўтаральная дакладнасць пазіцыянавання (мм) | ±0,05 | ||
| Хуткасць руху па восі X (м/мін) | 120 | ||
| Хуткасць руху па восі Y (м/мін) | 90 | ||
| Ход рычага па восі Z (м/мін) | 90 | ||
| Максімальная вага матэрыялу (кг) | 2 | 4 | 8 |
| Тып прывада | Серва+ рэдуктар | ||
| Спосаб перадачы | Трохвосевая зубчастая рэйка | ||

Напішыце тут сваё паведамленне і адпраўце яго нам





