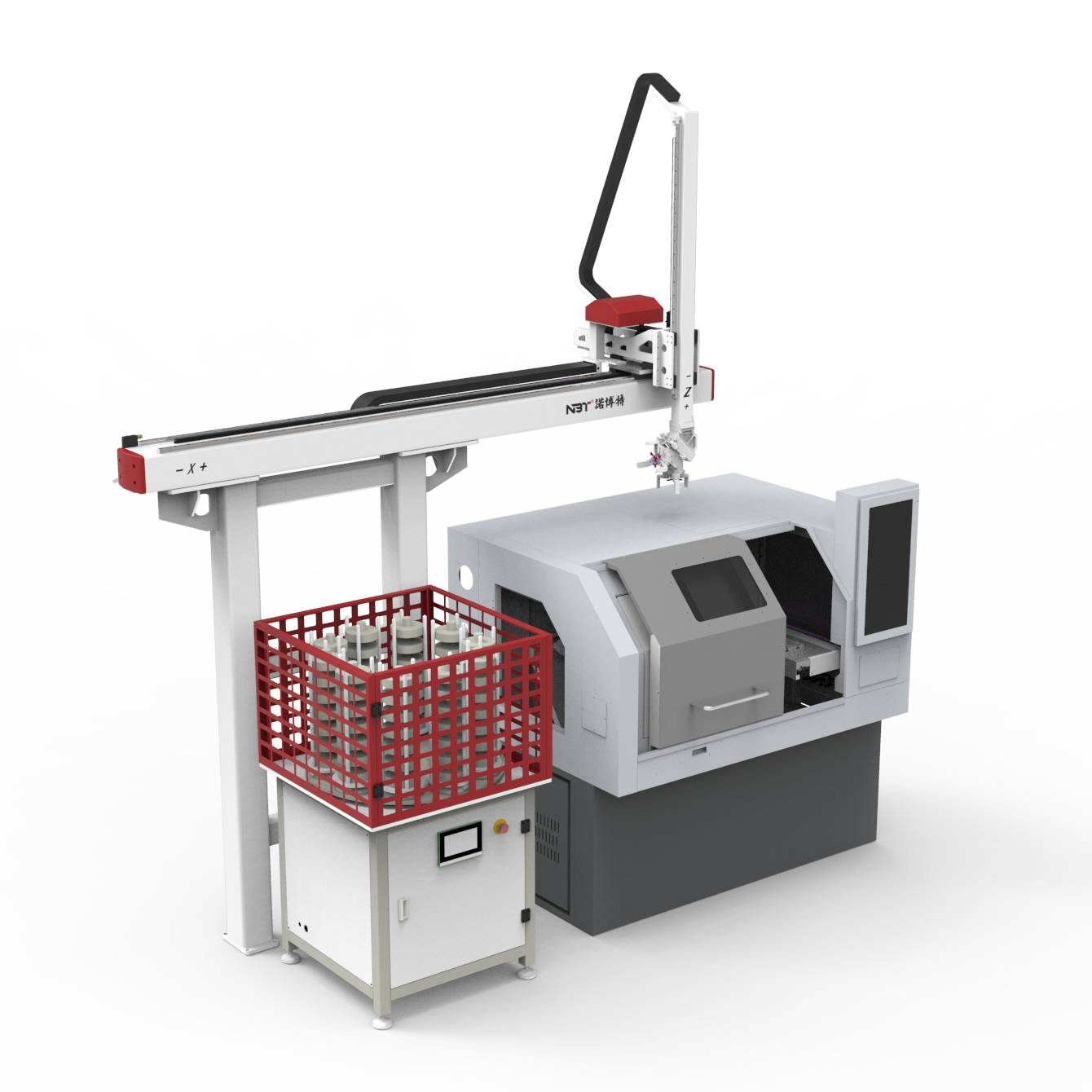
Робот для обрабатывающего центра с ЧПУ

| проект | SPRE3S-J-05 | SPRE3S-J-05 | SPRE3S-J-20 |
| Механическая нагрузка на руку (кг) | 2,5х2 | 5x2 | 10x2 |
| Горизонтальное перемещение (по оси X) | 1900/2300 (с возможностью индивидуальной настройки) | ||
| Ход вытягивания (ось Y) | 350 | ||
| Ход руки (по оси Z) | 1000 | ||
| Точность повторяющегося позиционирования (мм) | ±0,05 | ||
| Скорость перемещения по оси X (м/мин) | 120 | ||
| Скорость перемещения по оси Y (м/мин) | 90 | ||
| Ход манипулятора по оси Z (м/мин) | 90 | ||
| Максимальный вес материала (кг) | 2 | 4 | 8 |
| Тип привода | Редуктор сервопривода | ||
| Метод передачи | Трехосевая зубчатая рейка | ||

Напишите здесь своё сообщение и отправьте его нам.





