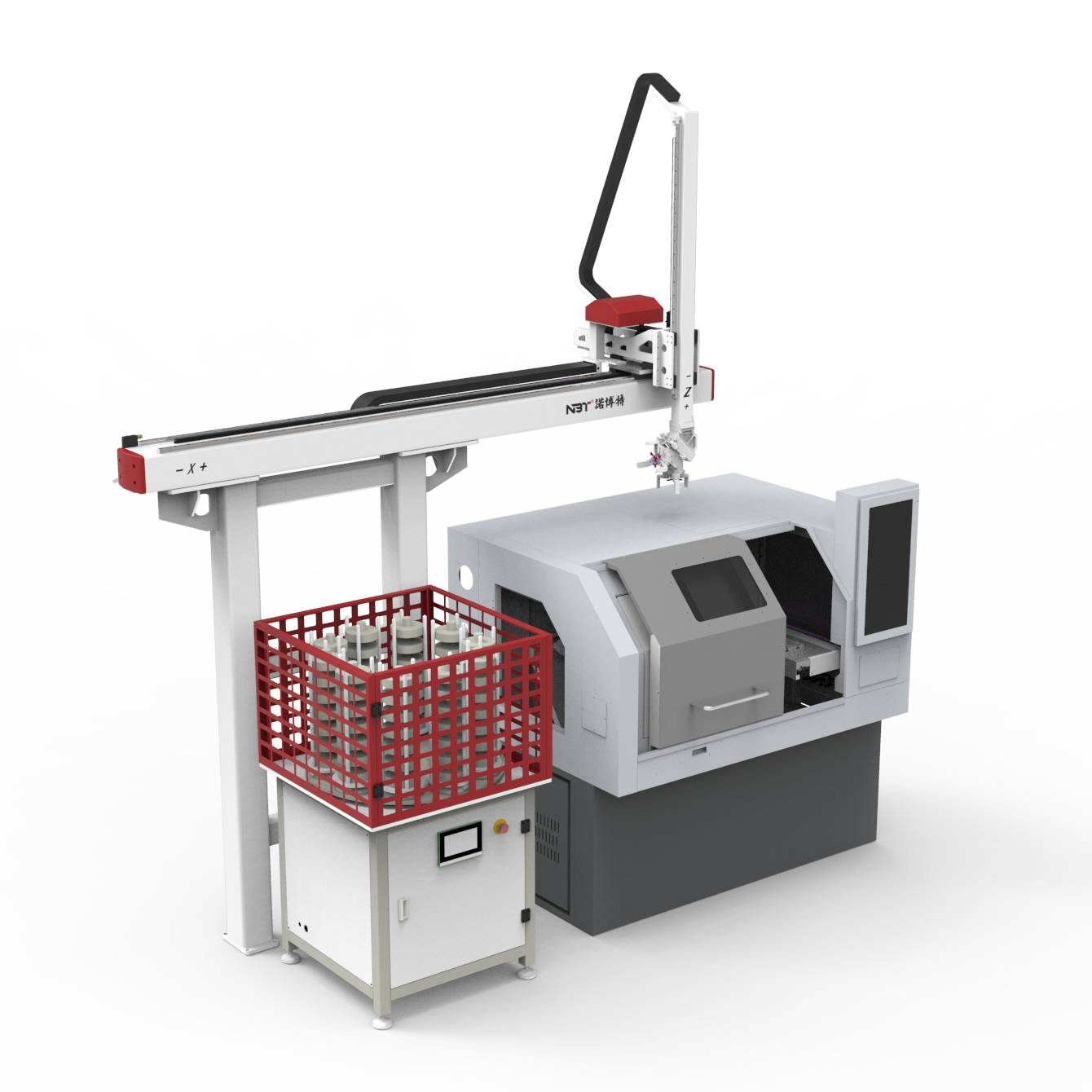
Робот за ЦНЦ центар

| пројекат | SPRE3S-J-05 | SPRE3S-J-05 | SPRE3S-J-20 |
| Механичко оптерећење руке (кг) | 2,5x2 | 5x2 | 10x2 |
| Хоризонтално кретање (X-оса) | 1900/2300 (прилагодљиво) | ||
| Покрет повлачења (Y-оса) | 350 | ||
| Покрет руке (Z-оса) | 1000 | ||
| Понављајућа тачност позиционирања (мм) | ±0,05 | ||
| Брзина кретања X-осе (м/мин) | 120 | ||
| Брзина кретања Y-осе (м/мин) | 90 | ||
| Ход руке по Z-оси (м/мин) | 90 | ||
| Максимална тежина материјала (кг) | 2 | 4 | 8 |
| Тип погона | Серво+ редуктор | ||
| Метод преноса | Троосна зупчаста летва | ||

Напишите своју поруку овде и пошаљите нам је





