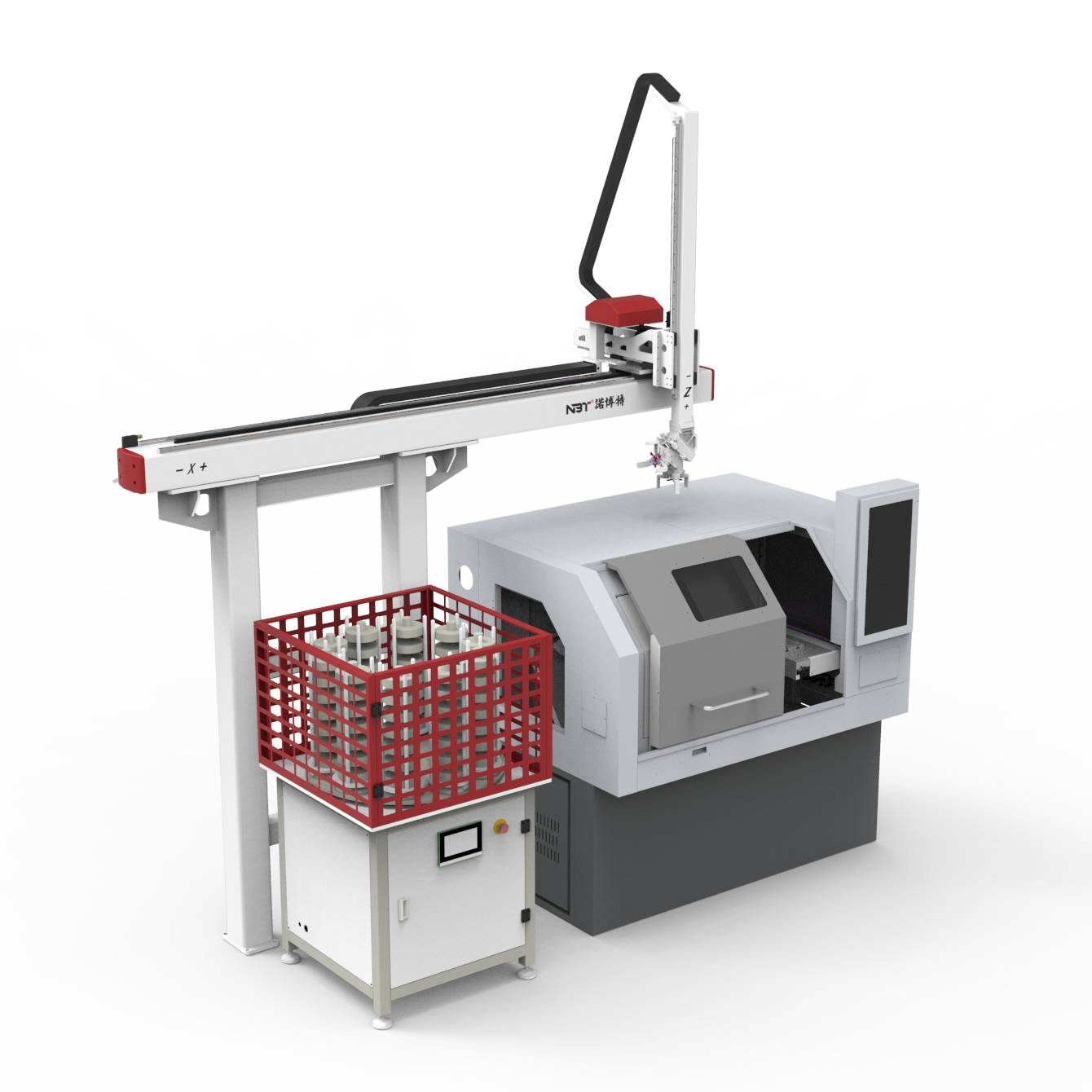
ربات برای مرکز CNC

| پروژه | SPRE3S-J-05 | SPRE3S-J-05 | SPRE3S-J-20 |
| بار بازوی مکانیکی (کیلوگرم) | ۲.۵x۲ | ۵x۲ | ۱۰x۲ |
| حرکت افقی (محور X) | ۱۹۰۰/۲۳۰۰ (قابل تنظیم) | ||
| حرکت کششی (محور Y) | ۳۵۰ | ||
| حرکت بازو (محور Z) | ۱۰۰۰ | ||
| دقت موقعیتیابی تکراری (میلیمتر) | ±۰.۰۵ | ||
| سرعت حرکت محور X (متر بر دقیقه) | ۱۲۰ | ||
| سرعت حرکت محور Y (متر بر دقیقه) | 90 | ||
| حرکت بازو در محور Z (متر بر دقیقه) | 90 | ||
| حداکثر وزن مواد (کیلوگرم) | 2 | 4 | 8 |
| نوع درایو | کاهنده سروو + | ||
| روش انتقال | قفسه دنده سه محوره | ||

پیام خود را اینجا بنویسید و برای ما ارسال کنید





