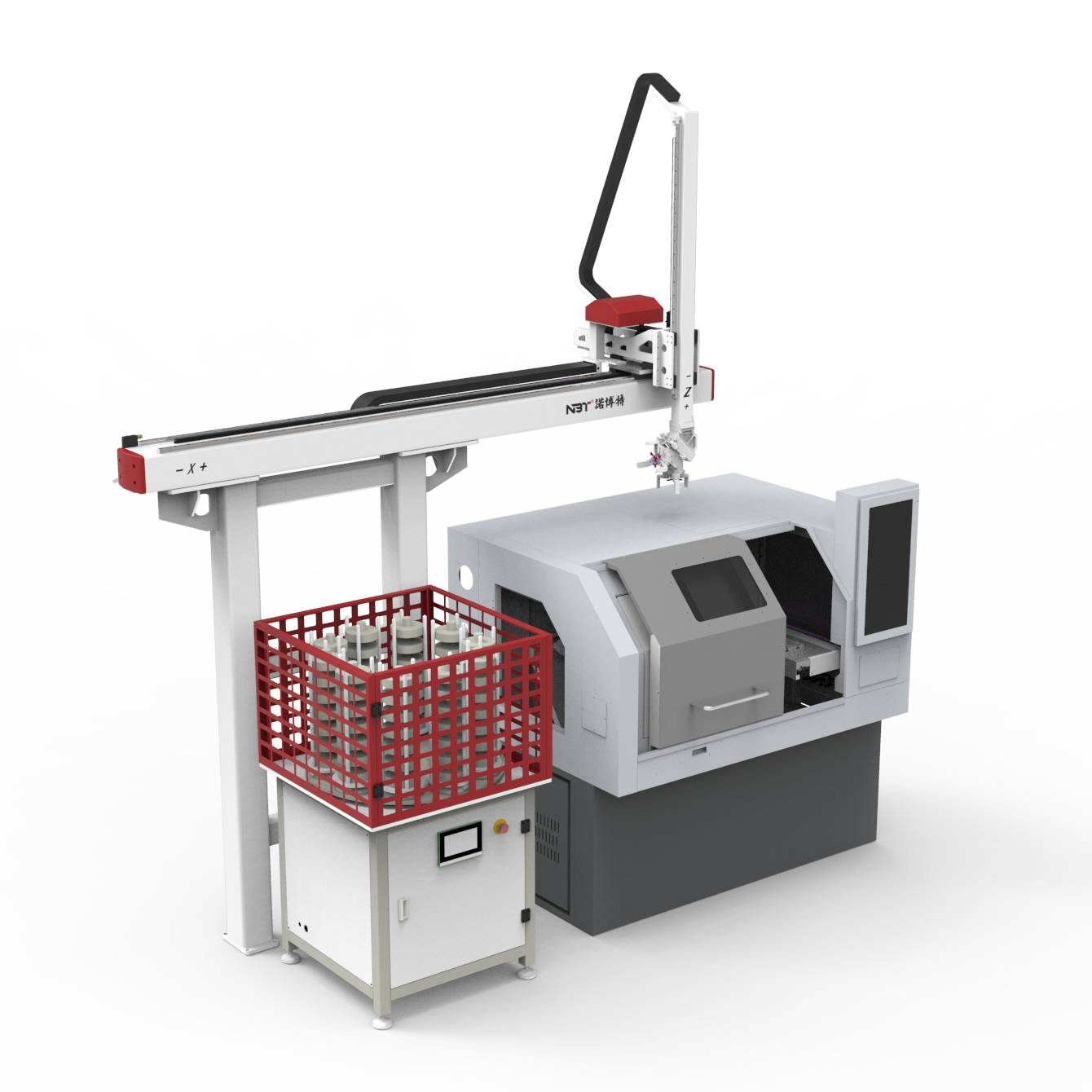
روبوت لمركز التحكم الرقمي بالحاسوب

| مشروع | SPRE3S-J-05 | SPRE3S-J-05 | SPRE3S-J-20 |
| حمل الذراع الميكانيكية (كجم) | 2.5x2 | 5x2 | 10x2 |
| الحركة الأفقية (المحور السيني) | 1900/2300 (قابل للتخصيص) | ||
| شوط السحب (المحور Y) | 350 | ||
| حركة الذراع (المحور Z) | 1000 | ||
| دقة تحديد المواقع المتكررة (مم) | ±0.05 | ||
| سرعة الحركة على المحور السيني (م/دقيقة) | 120 | ||
| سرعة الحركة على المحور الصادي (م/دقيقة) | 90 | ||
| شوط ذراع المحور Z (م/دقيقة) | 90 | ||
| أقصى وزن للمادة (كجم) | 2 | 4 | 8 |
| نوع محرك الأقراص | مخفض السرعة Servo+ | ||
| طريقة النقل | مسننات ثلاثية المحاور | ||

اكتب رسالتك هنا وأرسلها إلينا





