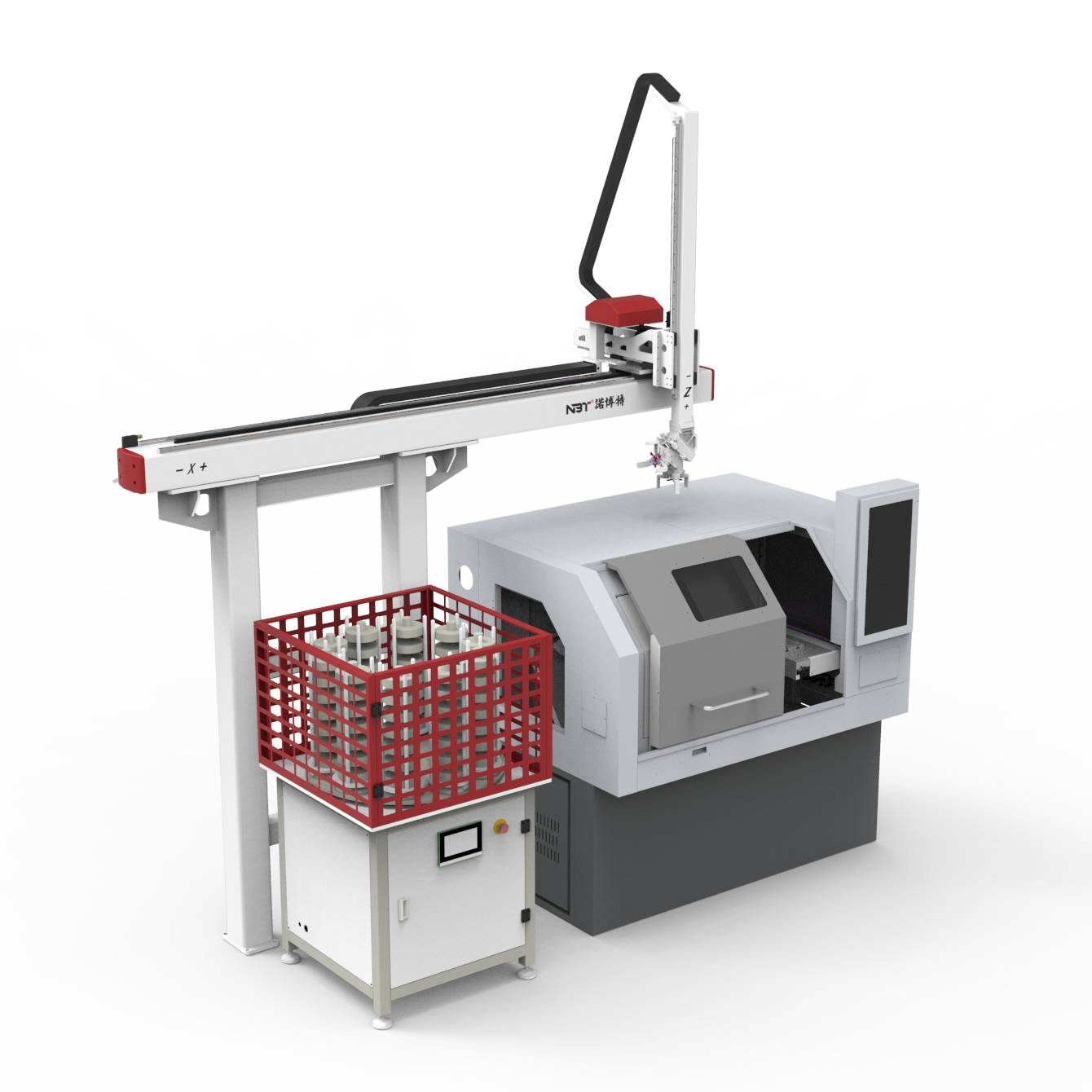
Robot do centrum CNC

| projekt | SPRE3S-J-05 | SPRE3S-J-05 | SPRE3S-J-20 |
| Obciążenie ramienia mechanicznego (KG) | 2,5x2 | 5x2 | 10x2 |
| Podróż pozioma (oś X) | 1900/2300 (konfigurowalne) | ||
| Skok pociągnięcia (oś Y) | 350 | ||
| Ruch ramienia (oś Z) | 1000 | ||
| Powtarzalna dokładność pozycjonowania (mm) | ±0,05 | ||
| Prędkość ruchu w osi X (m/min) | 120 | ||
| Prędkość ruchu w osi Y (m/min) | 90 | ||
| Skok ramienia w osi Z (m/min) | 90 | ||
| Maksymalna waga materiału (kg) | 2 | 4 | 8 |
| Typ napędu | Serwo+ reduktor | ||
| Metoda transmisji | Przekładnia zębata trójosiowa | ||

Napisz tutaj swoją wiadomość i wyślij ją do nas





